Please visit Google Scholar for a complete list.
2026
-
Geometry-Aware Probabilistic Shared Autonomy with Riemannian Motion Policies
Kay Pompetzki, Cristiana Farias, João Carvalho, Georgia Chalvatzaki, and Jan Peters
ICRA Workshop: Geometry in the Age of Data-Driven Robotics, 2026
-
Real-World Deployment of Massively Parallel Sampling-Based MPC for Contact-Rich Manipulation
Magnus Dierking, João Carvalho, An Thai Le, Georgia Chalvatzaki, and Jan Peters
ICRA Workshop: Frontiers of Optimization for Robotics, 2nd Edition, 2026
2025
-
Motion Planning Diffusion: Learning and Adapting Robot Motion Planning With Diffusion Models
João Carvalho, An T. Le, Piotr Kicki, Dorothea Koert, and Jan Peters
IEEE T-RO, 2025
-
Enhancing Robot Manipulation Skills through Learning
João Carvalho
Ph.D. Thesis, 2025
-
Model Tensor Planning
An Thai Le, Khai Nguyen, Minh Nhat Vu, João Carvalho, and Jan Peters
TMLR, 2025
-
Global Tensor Motion Planning
An T. Le, Kay Pompetzki, João Carvalho, Joe Watson, Julen Urain, and 3 more authors
IEEE RA-L, 2025
2024
-
Grasp Diffusion Network: Learning Grasp Generators from Partial Point Clouds with Diffusion Models in SO(3)xR3
João Carvalho, An T. Le, Philipp Jahr, Qiao Sun, Julen Urain, and 2 more authors
arXiv, 2024
-
ActionFlow: Equivariant, Accurate, and Efficient Policies with Spatially Symmetric Flow Matching
Niklas Funk, Julen Urain, Joao Carvalho, Vignesh Prasad, Georgia Chalvatzaki, and 1 more author
arXiv, 2024
2023
-
Motion Planning Diffusion: Learning and Planning of Robot Motions with Diffusion Models
João Carvalho, An T. Le, Mark Baierl, Dorothea Koert, and Jan Peters
IROS, 2023
-
Diminishing Return of Value Expansion Methods in Model-Based Reinforcement Learning
Daniel Palenicek, Michael Lutter, Joao Carvalho, and Jan Peters
ICLR, 2023
2022
-
Adapting Object-Centric Probabilistic Movement Primitives with Residual Reinforcement Learning
João Carvalho, Dorothea Koert, Marek Daniv, and Jan Peters
Humanoids, 2022
-
Conditioned Score-Based Models for Learning Collision-Free Trajectory Generation
João Carvalho, Mark Baierl, Julen Urain, and Jan Peters
NeurIPS Workshop SBM, 2022
-
Batch Reinforcement Learning With a Nonparametric Off-Policy Policy Gradient
Samuele Tosatto, João Carvalho, and Jan Peters
IEEE TPAMI, 2022
2021
-
An Empirical Analysis of Measure-Valued Derivatives for Policy Gradients
João Carvalho, Davide Tateo, Fabio Muratore, and Jan Peters
IJCNN, 2021
2020
-
A Nonparametric Off-Policy Policy Gradient
Samuele Tosatto, João Carvalho, Hany Abdulsamad, and Jan Peters
AISTATS, 2020
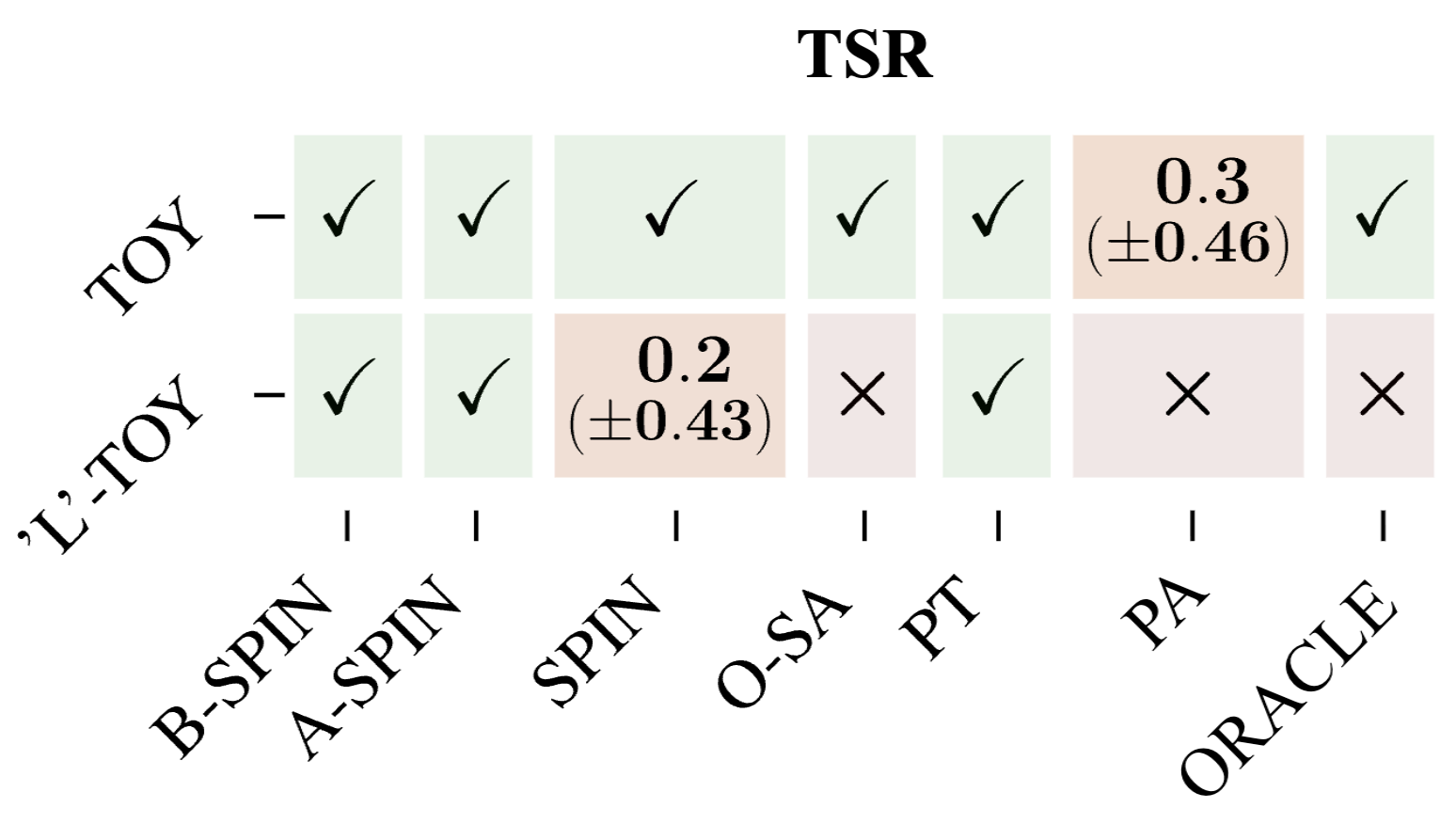 Geometry-Aware Probabilistic Shared Autonomy with Riemannian Motion PoliciesICRA Workshop: Geometry in the Age of Data-Driven Robotics, 2026
Geometry-Aware Probabilistic Shared Autonomy with Riemannian Motion PoliciesICRA Workshop: Geometry in the Age of Data-Driven Robotics, 2026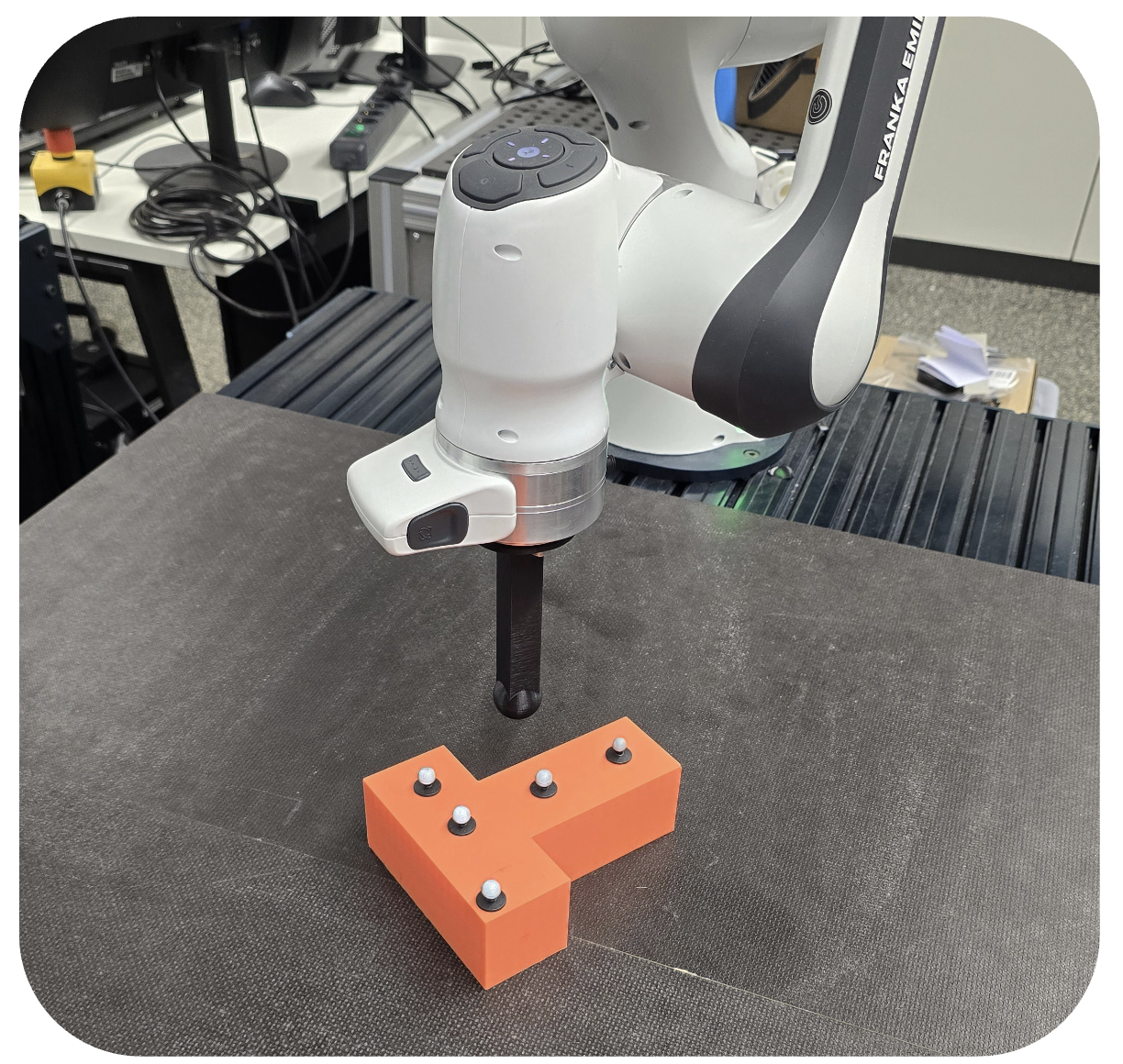 Real-World Deployment of Massively Parallel Sampling-Based MPC for Contact-Rich ManipulationICRA Workshop: Frontiers of Optimization for Robotics, 2nd Edition, 2026
Real-World Deployment of Massively Parallel Sampling-Based MPC for Contact-Rich ManipulationICRA Workshop: Frontiers of Optimization for Robotics, 2nd Edition, 2026









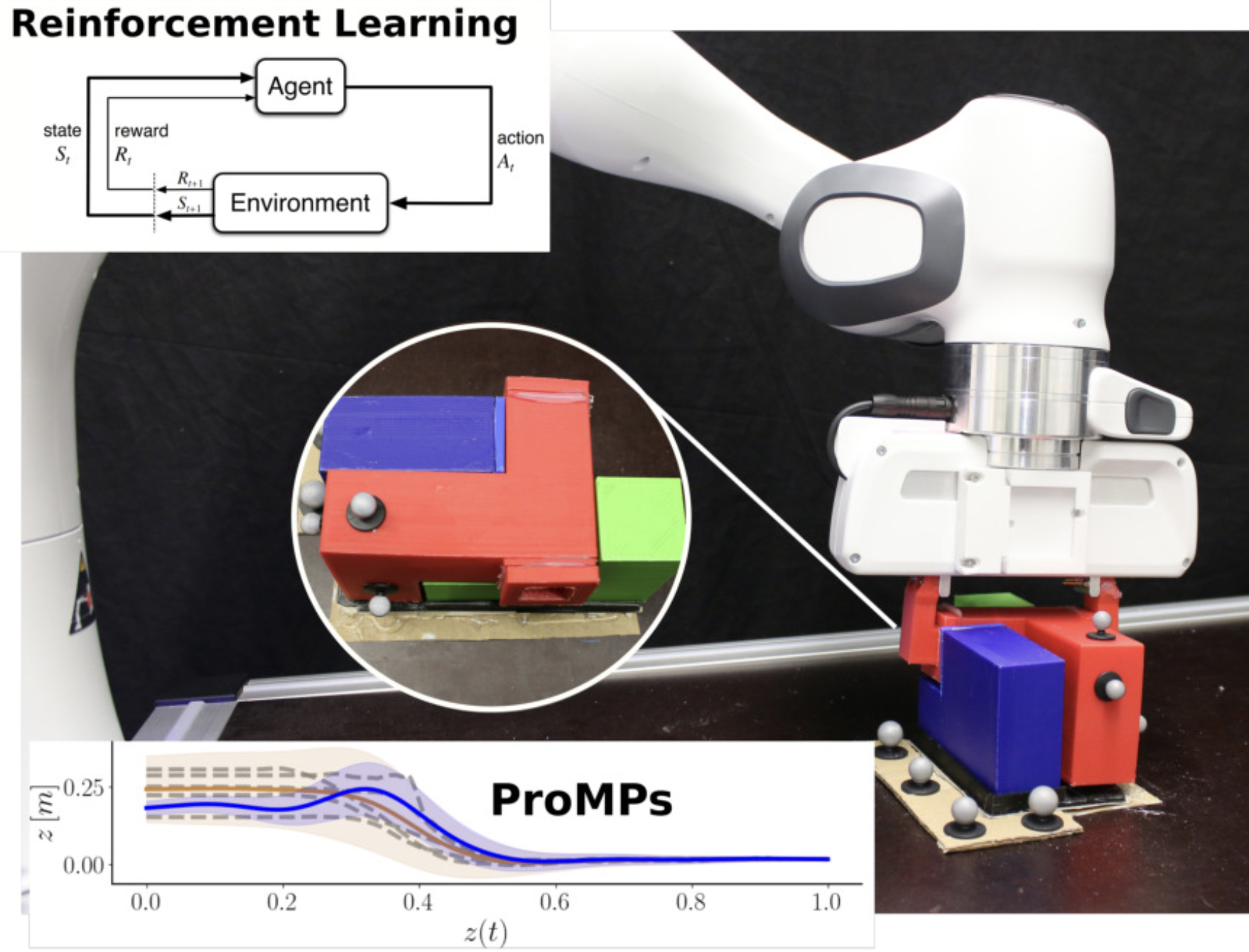 Adapting Object-Centric Probabilistic Movement Primitives with Residual Reinforcement LearningHumanoids, 2022
Adapting Object-Centric Probabilistic Movement Primitives with Residual Reinforcement LearningHumanoids, 2022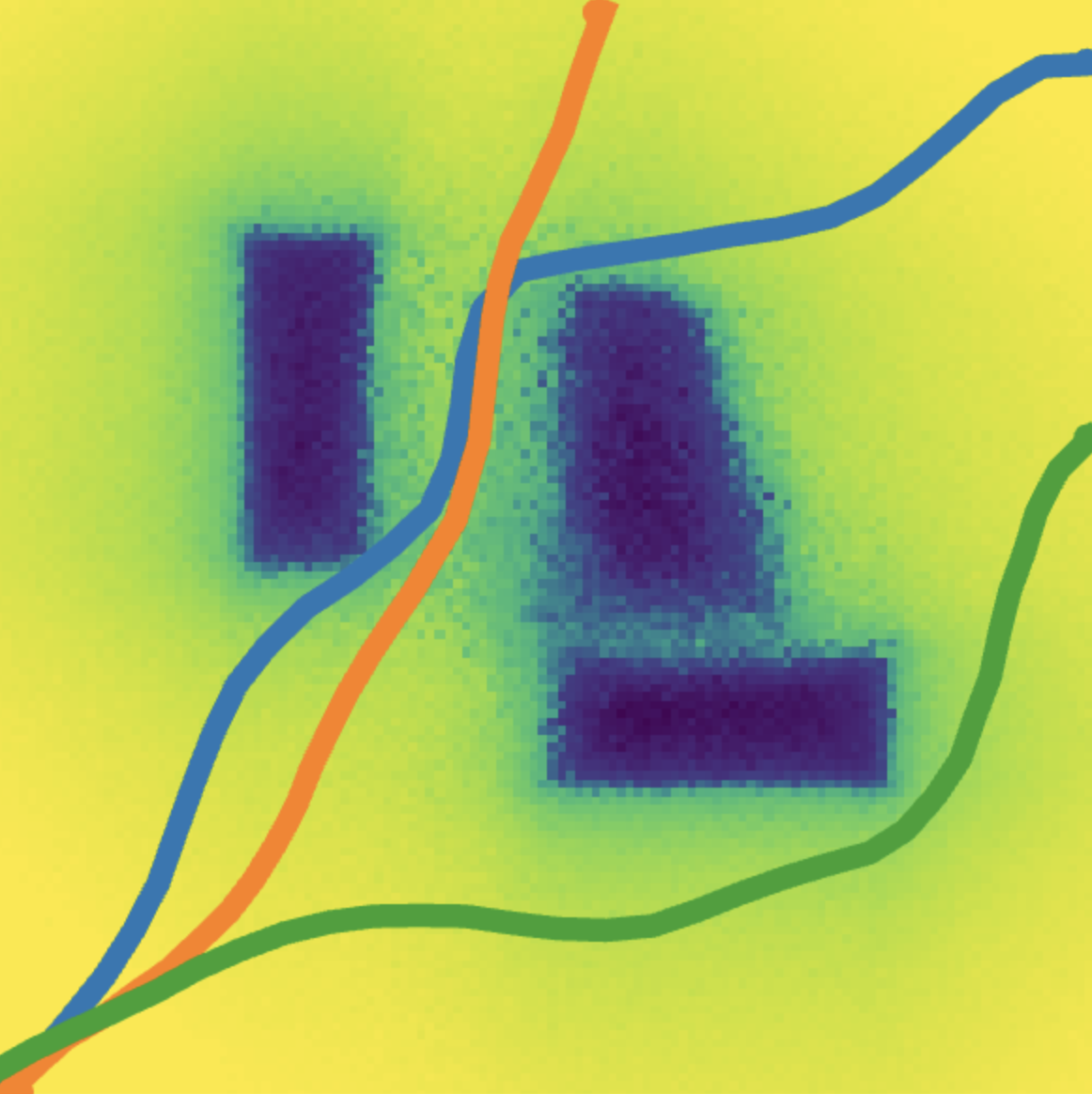 Conditioned Score-Based Models for Learning Collision-Free Trajectory GenerationNeurIPS Workshop SBM, 2022
Conditioned Score-Based Models for Learning Collision-Free Trajectory GenerationNeurIPS Workshop SBM, 2022



